哈工大4指机械手来啦!
10余种手势可代替或辅助人手操控
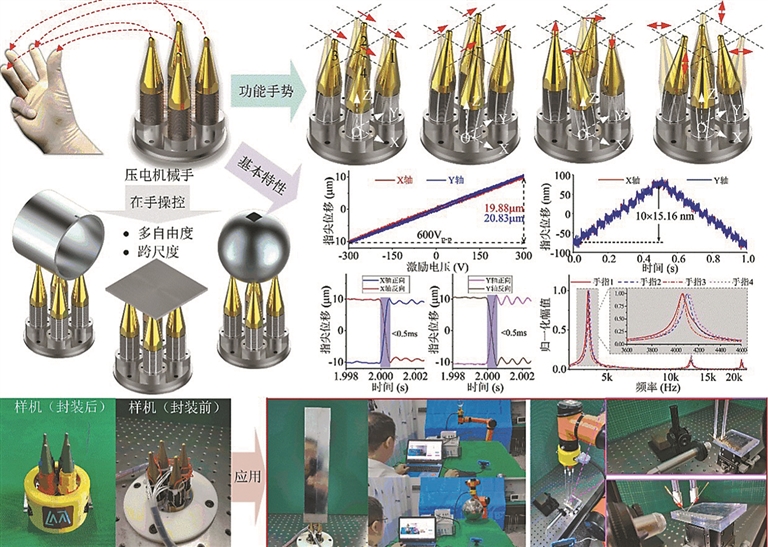
生活报讯 (记者吕晓艳) 记者从哈尔滨工业大学获悉,近日,该校机器人技术与系统国家重点实验室刘英想教授团队在压电机械手研究方面取得新进展,开发出由压电陶瓷驱动的新型4指压电机械手,相关成果以《面向宏微跨尺度操控的压电机械手》为题发表在《自然通讯》上。据悉,机械手可代替或辅助人手实现灵巧操控,压电机械手独特的宏微运动操控能力,有望解决诸多先进技术领域面临的跨尺度精细操控难题。
该项研究工作开发出运用压电陶瓷构造的4指机械手。该机械手采用4指阵列均布构型,其手指为4分区环形压电陶瓷集成一体化结构,凭借逆压电效应实现电能至机械能转换,从而将压电陶瓷的多维微观变形转换为手指的多维运动。团队运用4指协同操控思想,规划了10余种典型功能化操控手势,借助动静摩擦交替操控方法实现平板型、圆柱型、球型等物体的多维跨尺度操控。一系列应用探索试验成功,展示了压电机械手在构建多自由度操控设备和集成机械臂末端执行器等方面的应用潜力。
据悉,该研究获得国家自然科学基金、哈工大医工理交叉基金的资助。该4指压电机械手获第四届中国研究生机器人创新设计大赛特等奖。